近日,有设计界“奥斯卡”之称的德国iF设计奖公布了2024年度获奖名单。网易伏羲挖掘机器人客户端凭借其卓越的设计理念,从来自全球72个国家/地区的近11000件参赛作品中脱颖而出,荣获这一国际设计界的重要奖项。

获奖主页指路:
https://ifdesign.com/en/winner-ranking/project/the-fuxi-excavator-robot/634337
iF设计奖创立于1954年,由德国历史最悠久的工业设计机构——汉诺威工业设计论坛(iF Industrie Forum Design)每年定期举办,以“独立、严谨、可靠”的评奖理念闻名于世,已经被国际公认为当代工业设计领域中卓有声望的大奖。iF设计奖与红点奖(Red Dot)和IDEA奖并称为世界三大设计奖。
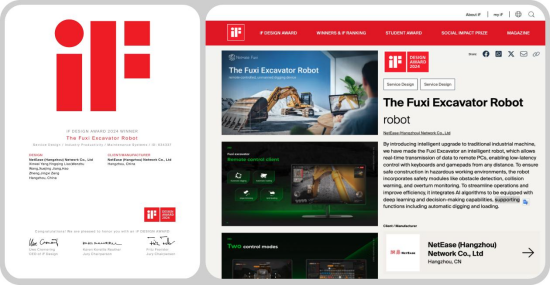
今年是iF大奖走过的第71个年头,2024年iF设计奖总共征集了来自72个国家/地区的10807件参赛作品,参赛作品数量之高,创历届之最。网易伏羲挖掘机器人能够获此殊荣,也是国际权威工业设计机构对网易伏羲团队在人工智能领域持续探索、不懈创新、积极拥抱AI技术、发挥社会价值的高度认可。
网易伏羲挖掘机器人依托网易自主研发的工业大模型,成功将游戏领域的AI技术应用于现实,致力于为社会创造更多价值。该机器人集成了感知、决策、控制和学习等核心模块,通过对传统挖掘机数智化改造,使其具备远程控制能力。在工程施工中,它能够代替挖机师傅执行高风险任务,并通过先进的感知模块,实时监测障碍物和防止车辆倾覆,确保机器和周围环境的安全。此外,其智能决策能力还能有效提升作业效率,为施工单位的工程进度提供有力保障。

多样化的操控设备为用户提供了灵活多样的选择,用户可以通过键盘输入指令,或使用鼠标进行精确的点选和拖拽操作,实现对挖掘机的远程操控。手柄则提供了更为专业、沉浸式的操控体验,它配备多个按钮、摇杆和触摸板,允许用户进行多功能的快速切换和精细调节。而智能驾驶座舱则为用户精心打造了一个身临其境的模拟驾驶环境,使得操控更加直观自然,仿佛置身于真实的驾驶环境中。

网易伏羲挖掘机器人通过引入先进的AI算法,赋予其深度学习和自主决策的能力。这种智能化的升级使得机器人具备多场景施工能力,如精准的定点挖掘和高效的区域装车等。这不仅极大地简化了操作流程,降低了人为操作的风险,还显著提高了作业效率,使得工程建设变得更加高效、安全和可靠。

在网易伏羲工业大模型和面向智能体编程(AOP)技术的引领下,我们成功实现了实时场景重建技术,网易伏羲挖掘机器人因此具备了自主决策和精准控制的能力。这为矿山、港口等工业场景带来了前所未有的智能化应用前景,极大地拓宽了工业生产的边界。通过虚拟与现实的深度融合,施工的高效性和安全性都得到了有力保障。

目前,网易伏羲挖掘机器人已经在矿山、港口等多个不同场景中实现了自动化、数字化的作业模式。我们与红狮水泥、冀东水泥等行业领先企业建立了深厚的商业合作关系。我们不仅在四川理塘川藏线成功完成了全球首次在高原地区的自动化作业任务,展现了其卓越的性能和高度适应性。同时,我们还积极融入教育领域,与新疆某职业技术学院建立了紧密的合作关系,为学生们提供了一个亲身体验、深入探索智能制造技术的宝贵平台,助力培养未来的行业精英。
未来,网易伏羲将继续深耕工程机械领域,通过人与机器的自然协作,让机器替代人们从事重复枯燥、具有危险性的工作,帮助行业解决“用工荒”问题,进一步促进数字经济与实体经济深度融合,推动实体经济提质增效发展。