癌症作为危害人类生命健康的重大疾病,对全人类的生存构成严峻挑战。《“健康中国2030”规划纲要》中明确提出医疗改革的重点是解决中国大陆日益增加的癌症负担。迄今为止,日益增长的癌症患病率和高死亡率凸显了当前癌症治疗方法的不足与低效。新纳米药物的创造及新的合成方法的研发与人民医疗、健康、安全以及生活质量息息相关,也为癌症病人提供了新契机,因此,研发新型高效的纳米药物是目前肿瘤药物治疗的重大需求,具有广泛和迫切的临床使用需求。然而,由于肿瘤生理屏障的存在和肿瘤微环境的复杂性,导致纳米药物在肿瘤中的递送面临巨大挑战,从而极大地限制了临床治疗效果。
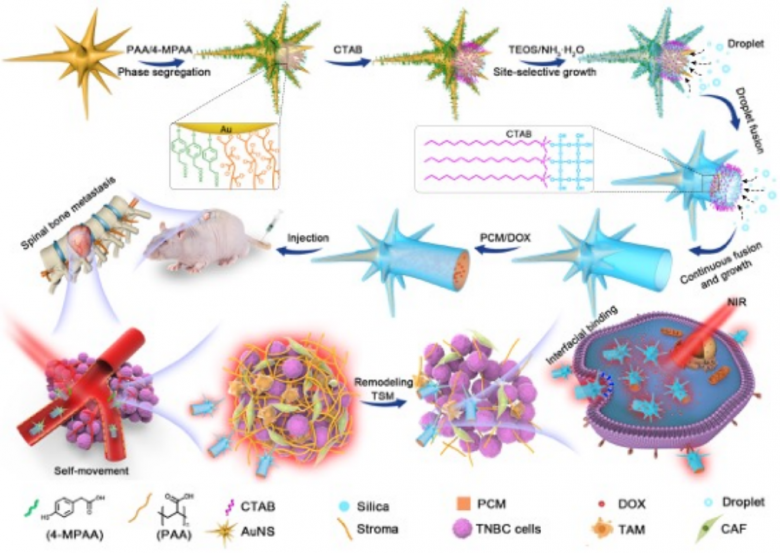
有鉴于此,复旦大学化学系孔彪课题组和复旦大学附属中山医院江立波课题组提出一种位点选择性超组装策略,设计了智能的多功能仿生头/空心尾纳米机器人,使纳米机器人载药系统到达肿瘤深处,进而发挥疗效。研究表明,纳米机器人通过重塑肿瘤微环境及其近红外响应的自主运动能力协同促进其肿瘤渗透。此外,自主移动能力和仿生头部结构显著促进了纳米-生物界面相互作用力,提升细胞摄取效率。这些纳米机器人在多种具有硬基质的肿瘤小鼠模型中显示出强大的抗肿瘤功效。实现对一类具有硬基质的肿瘤的有效化疗。
该研究为合成先进的多功能智能纳米载体的设计提供了思路与范例,有望为具有硬基质肿瘤的癌症治疗比如乳腺癌,胰腺癌和黑色素瘤提供了一种具备前景的治疗策略。
上述研究成果以“Site-Selective Superassembly of Biomimetic Nanorobots Enabling Deep Penetration into Tumor with Stiff Stroma”为题发表于《Nature Communications》。
免责声明:市场有风险,选择需谨慎!此文仅供参考,不作买卖依据。