6月6日,毫末智行 CEO 顾维灏受邀出席“太湖对话:人工智能+”暨清华大学无锡研究院智能产业创新中心成立仪式,并与业内专家在“AI 在自动驾驶、机器人的应用”分论坛上,就 AI 技术在自动驾驶和机器人领域的应用前景进行了深入探讨。
大会上,中国工程院院士、清华大学智能产业研究院(AIR)院长张亚勤院士发表了题为《人工智能发展的一些观点》的主旨演讲,深入探讨了 AI 大模型的发展趋势,并围绕 AI 发展、无人驾驶等话题发表了观点及建议。

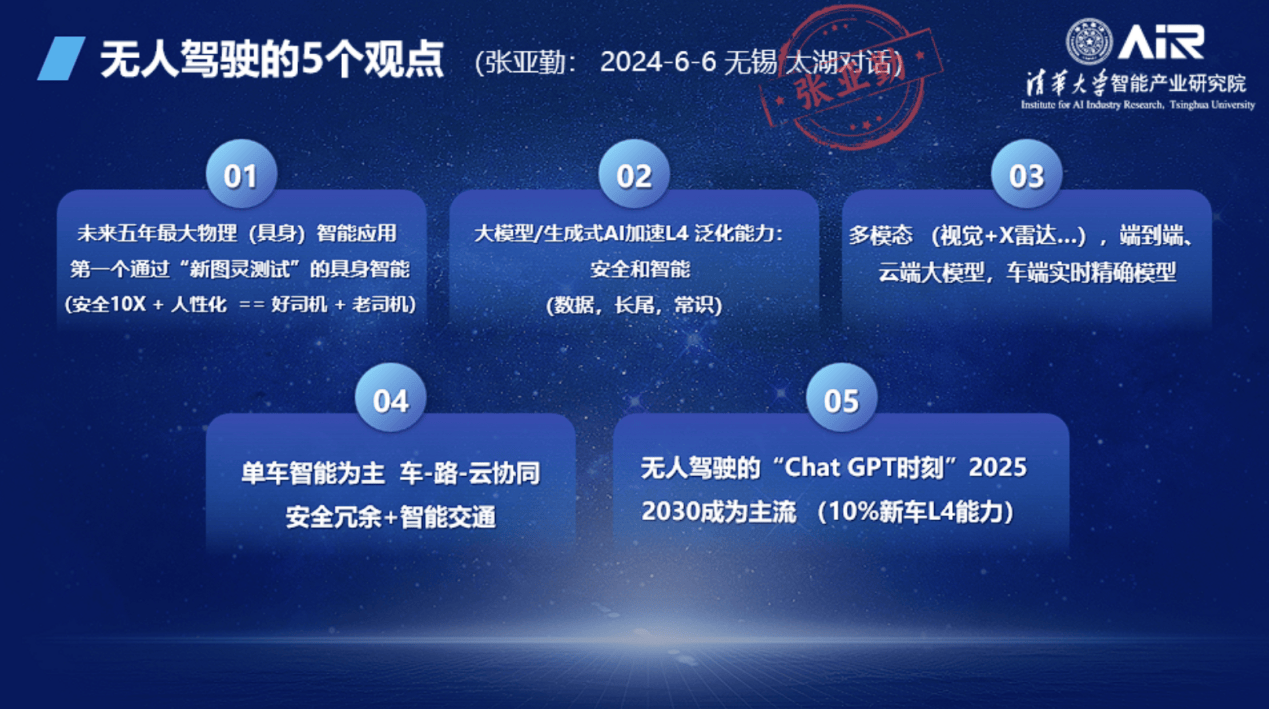
其中,关于无人驾驶技术的未来发展前景,张亚勤院士提出了五大观点。
第一,无人驾驶将是未来五年内最大的物理(具身)智能应用,并且有望成为第一个通过“新图灵测试”的具身智能系统。高于人类驾驶10倍安全性和更具有人性化体验的驾驶能力,有望使得完全无人化的无人驾驶系统达到人类老司机和好司机的水平。
第二,大模型和生成式 AI 在提升 L4 级别自动驾驶系统的泛化能力方面将发挥关键作用。其中,生成式 AI 可以结合真实数据生成高质量 Corner Case 数据,同时填补 Corner Case 中场景仿真、模拟不足的问题以解决感知长尾的问题,以及提升自动驾驶系统常识推理的能力。
第三,自动驾驶技术将整合多模态传感器数据(如视觉、激光雷达等),采用端到端训练,实现云端大模型与车端实时精确模型的协同工作。
第四,未来的自动驾驶技术将以单车智能为主,车-路-云协同工作,确保安全冗余,辅助智能交通。
第五,2025年将成为无人驾驶的“ChatGPT 时刻”,2030年无人驾驶成为主流,预计有10%的新车具备 L4 级别的自动驾驶能力。
大会共设三场圆桌论坛,AIR 无锡创新中心执行主任陈亦伦主持了“AI 在自动驾驶、机器人的应用”分论坛,与毫末 CEO 顾维灏等业内专家就 AI 技术在自动驾驶和机器人领域的应用前景进行了深入探讨。

(毫末智行CEO顾维灏受邀出席“太湖对话:人工智能+”暨清华无锡研究院智能创新中心成立仪式)
以下为顾维灏问答环节实录:
陈亦伦:尊敬的各位嘉宾,尊敬的各位同仁,今天非常荣幸,希望能够得到一些行业的输入和宝贵观点。今天这个话题也是我个人非常感兴趣的话题,因为我发现我们第三场有个特点,第三场好像所有嘉宾,包含主持人在做自动驾驶的时间都特别长,所以其实我们也真的很想讨论一些问题,就是自动驾驶包括无人驾驶领域它不是一个特别年轻的领域,它从2004年—2007年宝马挑战赛就开始来做,到现在已经投资有20多年了,而且另外它不是轻投资,是非常重投资的行业,现在正儿八经自动驾驶玩家可能近千人,每年投资额可能有100亿人民币。连续20年这么重投资的行业来说我们来聊聊技术问题。
第一个问题,自动驾驶,包括辅助驾驶,或者无人驾驶,它现在最痛的问题都有哪些?针对这些痛的问题,我们之后会有哪些颠覆性技术让这些问题不再痛?
顾维灏:AI 大模型是自动驾驶真正实现的唯一路径,端到端会是未来很重要的技术方向。
在人工智能上我认为现在成为定律的只有一个,就是规模定律Scaling Law,大力出奇迹。
端到端是一种描述方式,但更应该去考虑如何获得和生产更多的自动驾驶合适的数据,来喂养一个更大更合适的模型,才能够打造出一个大力出奇迹的产品或者一个技术的效果。
面临的挑战我觉得主要有几个层面,第一个挑战是数据,数据获取的方式与处理的方式是一个非常关键的问题。数据不仅仅是技术问题,它更是一种模式问题,产品怎么做,商业模式是什么样,到最后的应用模式是什么。只有把这些问题解决好,我们才能持续获得高质量的数据。
第二个挑战是在视觉领域还没有一个更大的突破。自动驾驶从最早对图片的研究,到对激光雷达点云的研究,到现在对于连续视频时空数据的研究,数据在自动驾驶领域,在朝着变化的趋势上看,还是远远不够的。大家也一直在搞大模型在产业上的应用,但视觉模型一直都没有做得很大,10个 billion 左右的模型在很多应用上看可以,再往上做效果比较有限。原因可能是我们 Token 选择的不合理,或者编码选择的不合理,亦或数据本身质量还不够。数据一旦到了10个 billion 规模的时候,视觉领域还没有一个更大的突破。
第三个挑战,是做辅助驾驶、自动驾驶,其实最后还是要落到边缘,在云端上面的大模型,在边缘端怎么做配置,因为它的资源是更加有限的,这也是我们也一直在解决的问题。
第四个挑战就是验证的问题,做了一些大的模型,做了一些好的解决方案,不管是在云端还是在车端,这个领域和自然语言处理一个很重要的区别就是验证方法,验证方式、验证数据集也存在很多需要探索和解决的问题。
陈亦伦:我觉得您的视角特别好,我觉得我可以顺着再问一问,咱们可以换成用户体验视角,NABC 的 N,不一定要看技术,从从业人员、车主、终端使用用户的视角来看,自动驾驶技术或者它的产品做到一个什么样的地步,用户就会非常愿意付费来买单并且喜欢这样的产品?
顾维灏:安全肯定是一个基础,刚才很多人也都提过了。在这个安全的基础上,我总结用户可能更关注的三点,就是省力、省心、省钱。
省力是从驾驶员的角度考虑,开 L2+ 或者未来开 L3 的用户,希望车辆能够帮助缓解疲劳,减少精力。毫末做的产品在乘用车上是以辅助驾驶为主,用户辅助驾驶行驶里程目前已超过1.6亿公里,智能驾驶里程中高速场景占比超过40%,有的车型接近50%。这就说明刚刚跨越鸿沟理论,从5%到40%,已经到早期大众的领域。所以在高速场景下,从 L2+ 的辅助驾驶用户体验和统计数据上看,基本上可以达到替用户驾驶员省心的地步,未来离 L3 也不会很远。
省心是从乘客角度考虑,车上总会坐人,未来到 L4 也会坐人。省心更多是去理解现在的驾驶决策。AI 如何能够自己去把思考链表达出来、展示出来,然后交给在车内的乘客也好,未来 L4 的乘客也好,让他去理解车在想什么、场景如何处理?这是第二类乘客用户所关注的、我们要解决的问题。
第三类是省钱。毫末做了一个纯 L4 级的产品小魔驼,我们叫末端配送的最后一公里的全自动驾驶装备。现在在做商超的履约,也在送快递。我们以北京、苏州、大连、赣州的快递网点数据为例,它所解决的是:过去运一个快件,平均到一个快件上运输成本是2毛3分钱,用了末端物流自动配送车后,可以给快递网点老板降本到1毛1分钱,这对于快递老板来讲就完全把钱省下来了。快递老板显然会更喜欢使用新的工具替换原有的工作方式。所以亚勤老师列的五个观点,载物的自动驾驶可能比他预期出现的爆点还更早一点。
综合来看,开车的、坐车的用户,还有生产运营的用户,他们关注的就是省力、省心、省钱,当然安全还是一切的前提。
陈亦伦:您刚刚提到,载物的可能量产或者商业化会更快一点,很多时候大家会把这个载物的看成是自动机器人。您认为机器人这个领域来说,很多自动驾驶同行都转到机器人领域去了,它的进展有哪些,还有哪些遗留的问题需要被攻克的?
顾维灏:机器人以及现在很火的具身智能,跟我们说的自动驾驶技术挑战都一样,比如数据如何闭环,如何筛选。但也许它解决问题更容易、也许边缘的智能会更轻一点,更多的智能也许会从云端的推理直接来获得。另外一个还是应用场景,应用场景稍微好实现的可能还是那些相对任务比较确定性的领域。
陈亦伦:最后一个问题,假使说我们真的在几年内实现了自动驾驶的 ChatGPT 时刻,这个时刻我们获得的所有的认知,所有的方法,或者所有的技术,它有多少的比例是可以复用在我们继续往类似于一个更加通用的比如说人形机器人开发这件事情上?
顾维灏:应该说对物理世界的理解都是可以复用的,但每个机器人有每个机器人的用途,比如倒茶水的、工厂的、陪伴的、服务的机器人,但它们共同的基础是对物理世界的理解和认识,对世界知识的构建,这是所有机器人未来发展的一个很重要的基础。
陈亦伦:明白,我觉得整体来说还是非常积极的信号,自动驾驶和机器人从它的产业链、方法论驱动性是比较强的,而且车企有非常大的量产规模优势,可以充分控制成本,这对于机器人的发展也是非常有利的,机器人是很大的领域,在细分市场差距比较大,所以机器人可能要单独看它的商业形态和诉求。好的,今天我的问题就到这里了,非常感谢。